
El operador actúa sobre la
señal de mando (1) que, en nuestro ejemplo, es la
temperatura
deseada. Un componente del sistema de
control
denominado transductor se encarga de transformar una
determinada magnitud de entrada en otra de salida más apta
para su manipulación denominada señal de referencia
(2).
Esta señal de referencia, una vez
amplificada, actúa sobre el proceso para
obtener la señal controlada (3), en nuestro caso
la temperatura que debe tener la habitación.
En los procesos en
lazo abierto, tiene mucha importancia la variable tiempo. En
nuestro ejemplo, el tiempo de funcionamiento de la caldera. Si
esta variable está bien diseñada, obtendremos una
temperatura que se parecerá más o menos a la
deseada en (1) mientras no cambien las condiciones.
Si por ejemplo las condiciones de temperatura
exterior cambian, el sistema no lo sabrá y, por tanto,
estará funcionando el mismo tiempo y sin conocimiento
de esta perturbación exterior, cuando en realidad
tendría que actuar más o menos en función de
que la temperatura exterior suba o baje. Los cambios exteriores
significan perturbaciones del sistema (4) en la Figura 11.2.
Como vemos en el ejemplo, si en un sistema en
lazo abierto existen perturbaciones, no obtendremos la variable
deseada, por lo que tendríamos que recurrir a otro sistema
de control, como el que se verá a continuación.
Como ejemplos de sistemas de
control en la/o abierto, podemos citar des-de un simple
tostador de pan, pasando por una máquina de lavar, hasta
incluso el control de la velocidad de
un motor
derivación.
1.4 SISTEMAS DE
CONTROL EN LAZO CERRADO
Según hemos visto en el punto anterior, si
en un proceso se presentan perturbaciones no podemos utilizar
sistemas de control en lazo abierto.
Resulta más conveniente cuantificar
(referenciar) la señal o variable controladora e
intervenir en la cadena de mando para que la variable controlada
se parezca lo más posible a la señal de referencia
dada por la señal de mando. Por ello, es necesario realiza
una realimentación de la variable de salida a la entrada.
Este procedimiento se
denomina control en lazo cerrado, y su diagrama de
bloques lo podemos ver en la Figura 11.1.

Se definen los sistemas de control en lazo
cerrado como aquellos en los que existe una realimentación
de la señal de salida, o dicho de otra forma, aquellos en
los que la señal de salida tiene efecto sobre la acción
de control.
Otra forma de representar el sistema de control
en lazo cerrado la podemos observar en la Figura 11.4.
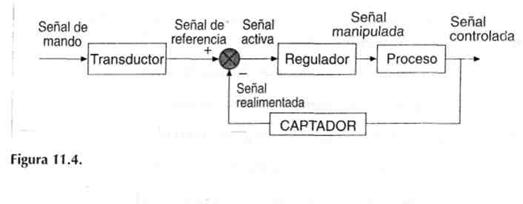
En algunas ocasiones, la señal controlada
y la señal de referencia no son de la misma naturaleza,
por ejemplo, la señal controlada puede ser una velocidad;
y la señal de referencia una tensión.
El instrumento encargado de detectar la
señal de salida para utilizarla de nuevo es el
Captador (Fig. 1.4). Este elemento mide la señal
controlada y la transforma en una señal que puedan
entender los demás componentes del sistema controlador.
Los tipos más habituales de señales
empleadas suelen ser neumáticas o eléctricas.
Las señales neumáticas empleadas
suelen ser señales variables que
oscilan linealmente entre 3 y 15 psi (libras por pulgada
cuadrada) o entre 0,2 y 1 kg/cm2.
En cambio, las
señales eléctricas que se utilizan suelen tomar
valores
comprendidos entre 4 y 20 mA, o entre 1 y 5 V en corriente
continua.
El siguiente paso consiste en comparar la
señal de referencia con la señal controlada (que el
captador ha transformado en señal realimentada),
para de terminar cuál es la diferencia existente entre
ambas. Esta operación se realiza mediante un comparador
que proporciona a su salida la señal de
error.
Esla señal de error se denomina
señal activa y es la que entra al regulador o
controlador.
El controlador debe actuar de manera que la
variable controlada siga las variaciones de la variable de
referencia o corrija los efectos de las perturbaciones, con la
máxima rapidez, la máxima exactitud, y el
mínimo de oscilaciones posible.
En este elemento se deben ajustar
óptimamente una serie de parámetros para obtener
una respuesta deseada. Por ello, este elemento se considera el
núcleo del sistema controlador.
A la salida del controlador obtenemos la variable
o señal corredora precisa para conseguir un control
óptimo del sistema.
Pueden emplearse controladores mecánicos,
hidráulicos, neumáticos o eléctricos. Estas
designaciones indican el portador a través del cual el
controlador recibe o transmite información.
Un ejemplo de control en bucle cerrado es el
control de temperatura de una habitación mediante un
termostato. Este elemento compara la temperatura indicada por el
selector de referencia con la temperatura ambiente de la
habitación, proporcionando, en el caso de no ser iguales,
una señal activa que actúa sobre la caldera para
ponerla en marcha, hasta que las diferencias de temperaturas sean
cero.
Además del ejemplo citado anteriormente,
como sistema de control en lazo cerrado podemos enumerar
también:
Mecanismo de llenado de una cisterna de
agua.La acción de un ser humano al
desplazarse.El sistema de evaluación de un alumno
en el colegio.Dispositivo de direccionamiento de un
cañón.Control de nivel de potencia de un reactor
nuclear.Sistemas de control de nivel de
líquidos y sólidos.
1.5. CRITERIOS Y ESPECIFICACIONES DE
DISEÑO
La adecuación de la variable controlada,
ante una variación de la señal de mando o una
perturbación, no es instantánea, sino que requiere
un tiempo de-terminado. La variación en función del
tiempo de la variable controlada es de gran importancia para el
diseño
y dimensionado del sistema de regulación.
Muchas veces, si queremos reducir el tiempo de
respuesta, podemos llevar a la variable controlada a una
variación de tipo oscilatorio en torno a un
valor concreto. Si
este fenómeno oscilatorio desaparece pasando un tiempo, el
sistema será estable. Si no es así (si existe una
oscilación mantenida de amplitud creciente), el sistema
será inestable.
La estabilidad es una condición
imprescindible en un sistema. Otra de las condiciones es que el
error en régimen permanente permanezca por debajo de un
límite. Una tercera condición supone que la
respuesta transitoria del sistema ha de ser aceptable.
Las características básicas de una
respuesta transitoria son:
La sobreoscilación máxima de
salida con respecto a su valor en régimen
permanente.La velocidad inicial de la respuesta.
El tiempo necesario para que la salida
alcance su valor permanente.
La respuesta normalizada a un escalón de
un sistema de regulación se muestra en la
Figura 11.5.

En esta figura podemos observar los siguientes
parámetros:
Mp= Sobreoscilación
máxima.
tr = Tiempo de subida por el que se
caracteriza la velocidad inicial de la respuesta.
tp = Es el tiempo que tarda en alcanzar
la sobreelongación máxima.
ts = Tiempo de establecimiento. El tiempo
necesario para que la salida alcance su régimen
permanente.
1 .6. CONCEPTO DE
FUNCIÓN DE TRANSFERENCIA
Para determinar la respuesta de un elemento, en
lo que respecta al tiempo y a la amplitud, se aplican
señales conocidas a la entrada del elemento y se
evalúan las señales que aparecen en la salida. La
respuesta obtenida se denomina respuesta
transitoria. Normalmente, la señal de entrada es
una señal de tensión con forma de
escalón.
El comportamiento
de un elemento no sólo se puede representar por la
razón correspondiente a la respuesta a un escalón,
sino que también puede describirse matemáticamente
mediante la función de transferencia o
respuesta en frecuencia.
Conocidas las ecuaciones que
definen el comportamiento de los elementos de un sistema,
éste puede estudiarse mediante el método
operacional de Laplace.
Según este método, si
son conocidas las relaciones entradas – salidas de cada uno de
los bloques, pueden deducirse otras relaciones entrada – salida
para los mismos en el dominio de
Laplace,
denominadas funciones de
transferencia.
Se define como función de transferencia, y
se indica por G(s), de un sistema o de un componente,
el cociente entre la transformada de Laplace de la
señal de salida y la transformada de Laplace de la
señal de entrada, según vemos en la Figura
11.6.


Dado un determinado sistema cuya función
de transferencia sea conocida, y obtenida la transformada de
Laplace C(s) de la salida, o respuesta del sistema en el
dominio de la variable compleja s, para hallar la respuesta
temporal tendremos que calcular la inversa de la transformada de
Laplace.
La función de transferencia se obtiene
transformando al dominio complejo la ecuación diferencial
que caracteriza el comportamiento del sistema en el dominio
temporal. Así, si se tiene un sistema lineal de entradas y
salidas únicas, resulta como expresión de la
función de transferencia la siguiente:

Como podemos ver, la función de
transferencia viene dada por el cociente de polinomios
N(s) y D(s) en el dominio de la variable
compleja s de Laplace, es decir, se pasa de una ecuación
diferencial a una ecuación algebraica.
El denominador D(s) es conocido también
con el nombre de ecuación característica,
pues incluye, a través de los valores de
sus coeficientes, todas las características físicas
de los elementos que componen el sistema:

Las raíces (valores para los
cuales se hace cero la ecuación) determinan la estabilidad
del sistema, así como la naturaleza de su respuesta para
cualquier tipo de entrada.
Un sistema lineal se dice que es estable cuando
su respuesta a una entrada tiene un valor finito de reposo una
vez desaparecida la señal de entrada, lo que equivale a
decir que la respuesta en régimen permanente ha de tener
un valor finito cuando el tiempo tienda a infinito.
Para que un sistema de regulación sea
estable, las raíces de la ecuación
característica, o polos (valores para los que la
función de transferencia se hace infinita) de la
función de transferencia, han de estar situados en el lado
izquierdo del semiplano complejo de Laplace (Fig. 11.7).

Existen varios métodos
para obtener la función de transferencia de un sistema de
regulación. El más utilizado consiste en obtener la
transformada de La-place de la ecuación diferencial que
describe el comportamiento del sistema, para hallar
posteriormente la relación: C(s) – C(s)/R(s).
Otro método es el experimental,
consistente en aplicar al sistema una señal conocida para
obtener la función de transferencia a partir de la forma
que presenta la función de salida.
1.7. ESTUDIO DE LA ESTABILIDAD DE UN
SISTEMA DE CONTROL
La estabilidad de un sistema se determina por su
respuesta a las entradas o per-turbaciones. Un sistema estable es
aquel que permanece en reposo a no ser que se excite por una
fuente externa y, en tal caso, volverá al reposo una vez
que desaparezcan todas las excitaciones.
La estabilidad se puede definir de las siguientes
formas:
a) Un sistema es estable si su respuesta
al impulso tiende a cero a medida que el tiempo tiende a
infinito.b) Un sistema es estable si cada entrada
limitada produce una salida limi-tada.
Para determinar si un sistema es estable o no se
emplean varios métodos. En este tema nos limitaremos al
estudio de dos de ellos:
Método de Routh. Que nos da una
idea global del sistema, es decir, nos dice si el sistema es
estable o no estable, pero no nos indica nada sobre lo cerca
o lejos que estamos de la estabilidad o inestabilidad. En
otras palabras, nos refleja la estabilidad
absoluta.Método del diagrama de Bode. Es
un método en el cual representamos la ganancia y el
ángulo de fase en función de la frecuencia y,
por tanto, vemos lo cerca o lejos que estamos de la
estabilidad o inestabilidad. Nos proporciona la
estabilidad relativa.
Capítulo 2
Tipos de
Control
2.1. INTRODUCCIÓN
En el tema anterior hemos realizado una introducción a los sistemas de control,
viendo los distintos tipos de lazos (abierto y cerrado) con sus
características, ventajas e inconvenientes. Se ha definido
el concepto de función de transferencia, estudiando el
agrupamiento de bloques funcionales y realizado su diagrama
equivalente mediante asociación y transposición
para llegar a un sólo bloque con su función de
transferencia, de la cual estudiamos la ecuación
característica para comprobar si el sistema era estable o
inestable.
Antiguamente el control de los procesos
industriales se realizaba de forma manual; era el
operario quien, basándose en su experiencia, realizaba los
cambios que creía convenientes sobre el proceso para
obtener el producto
final.
Posteriormente, la exigencia de una mayor
calidad en la
fabricación de productos
requirió otro tipo de control mucho más exacto, en
el cual se controlaban automáticamente las variables
más importantes que influían en el proceso.
En este tema estudiaremos una de las partes
fundamentales de un lazo de control.
De entre los diversos bloques que componen el
sistema nos pararemos en el estudio del controlador o regulador,
que en definitiva es el elemento que dota de personalidad
al sistema de control.
2.2. EL CONTROLADOR
Como hemos analizado en el tema anterior, en un
sistema de control y regulación podemos distinguir los
siguientes elementos o componentes:
Transductores y captadores.
Comparadores o detectores de error.
Elementos de control y regulación.
Elementos finales o actuadores.
Por otro lado, según hemos apuntado en la
Introducción, este tema lo vamos a dedicar en exclusiva al
estudio del regulador, por ser el elemento funda-'
mental del lazo de control. En el tema siguiente estudiaremos el
resto de los elementos.
Antes de comenzar con la explicación del
controlador, recordemos la estructura de
un lazo de regulación en bucle cerrado (Fig. 12.1).

El controlador es el cerebro de un
bucle de control, y es el encargado de comparar una variable
física con
el valor deseado, interpretar el error o desviación y
actuar para intentar anular dicho error. Mientras que la variable
a controlar se mantenga en el valor previsto, el controlador no
actuará sobre los elementos finales. Si la variable a
controlar se aparta del valor establecido, el controlador
modifica la señal para actuar sobre los elementos finales,
en el sentido de corregir dicha modificación, hasta que la
variable controlada vuelva al valor prefijado.
La aplicación del regulador en la industria
está presente desde el regulador centrífugo de
Watt (siglo XVIII)
Una gran parte de los controladores utilizados
desde hace tiempo elaboran la señal de mando a
través de un tratamiento de la señal de error entre
la señal de referencia y la señal de salida
(variable controlada) realimentada. Este trata- miento consiste
en la amplificación del error, su derivada respecto al
tiempo o su integración a lo largo del mismo, dando
lugar a las acciones
determinadas: proporcional (P), derivativa (D)
e integral (I).
En la práctica, los reguladores realizan
una de estas acciones:
Proporcional (P).
Combinación de dos de ellas (Pl o
PD).Las tres (PID).
La tecnología de estos
reguladores analógicos era, hasta la época de los
cincuenta, neumática, hidráulica o
electromagnética.
Posteriormente, se fueron afianzando en el
mercado los
reguladores analógicos electrónicos basados en
amplificadores operacionales, debido al avance de la
electrónica del estado
sólido.
En la época de los setenta comienza la
utilización de las técnicas digitales para
el control de procesos, y dentro de estas técnicas
el empleo del
ordenador como elemento de control.
Los controladores digitales responden
aproximadamente al siguiente esquema (Fig. 12.2):

Los controladores, como decíamos
anteriormente, se pueden clasificar en función de la
acción que realizan en:
Proporcional (P).
Derivativo (D).
Integral (I).
Pudiendo combinar sus acciones y ser:
Proporcional + Integral (P + I).
Proporcional + Derivativo (P + D).
Proporcional + Integral + Derivativo (P +
D + I).
Nota: ver apéndice 1
2.3. CONTROLADOR DE ACCIÓN
PROPORCIONAL

Cuando en un control proporcional se presenta una
desviación entre el punto de consigna y el valor real, el
elemento final se modifica en una cantidad proporcional al error.
Si el error es pequeño, el controlador originará un
pequeño cambio a la salida. Por el contrario, si la
señal de error es grande, producirá un cambio
también grande a la salida.
La función de transferencia de un
regulador proporcional es la siguiente:
G(s) = Kp
siendo Kp la ganancia proporcional del regulador.
Con este tipo de reguladores
se consigue desplazarla curva
característica en función de la variación de
la
ganancia, ya que un regulador proporcional puede
considerarse un transformador de escala.
En bucle cerrado, la función de
transferencia queda (Fig. 12.3):

En un controlador proporcional se tienen los
siguientes parámetros:
BP= Banda proporcional. Es el tanto
por ciento que tiene que variar la entrada al controlador
para que se altere el 100 por 100 de la variable de
salida.K´= Es el valor de salida que
proporciona el controlador cuando el error es del 100 por
100. Normalmente se le da un valor del 50 por 100.Kp = Es la ganancia proporcional, o
sea, la razón entre el cambio en la salida y el cambio
en la entrada. Determina la sensibilidad del controlador.
Está relacionado con la banda proporcional mediante la
expresión:
KP=100/(BP) [12.1]
Sf = Es la salida en %.
M = Medición.
PC – Es el punto de
consigna.

Las expresiones que relacionan todos estos
parámetros en un regulador proporcional son las
siguientes:

En la expresión [12.1] podemos observar
que con bandas proporcionales mayores del 100 por 100 no podemos
causar desplazamientos totales de los elementos finales. Una
banda proporcional grande significa que el controlador tiene poca
acción proporcional, es decir, poca ganancia, y
viceversa.
Veamos un ejemplo de control proporcional.
Tenemos un controlador de nivel por flotador que
nos permitirá comprender el funcionamiento de dicho
control (Fig. 12.4).

Mediante la válvula de control V
conseguimos que el caudal de entrada de agua al
depósito sea igual al caudal de salida, a base de mantener
el nivel constante en el depósito.
Con el tornillo A fijamos el punto de ajuste para
el nivel deseado.
Si se produce un aumento del caudal de salida,
disminuye el nivel del de- pósito, entonces el flotador, a
través de un brazo, actúa sobre la válvula
V, haciendo aumentar el caudal de entrada hasta que se iguale al
siguiente. Cuando se haya alcanzado la igualdad de
los caudales, el flotador estará a un nivel más
bajo que al principio, por lo que se produce un error
permanente.
Observamos que el regulador de acción
proporcional responde bien a las necesidades operativas, si el
error que se produce es tolerable.
En la Figura (12.5) podemos observar que el
regulador está ajustado para unas determinadas condiciones
de consumo de
agua. Si las condiciones cambian, la acción proporcional
actúa contra la desviación moviendo la
válvula y haciendo entrar más agua al
depósito, pero no es capaz de llevado a su anterior valor
de consigna, sino que lo deja en un punto más bajo
produciendo una desviación permanente llamada OFFSET.
Para eliminar la desviación, habría
que aumentar el PC (tornillo A), para que el nivel permanezca en
el valor deseado y no tener coincidencia entre el punto de
consigna y el valor deseado.
El principal inconveniente de un control
proporcional es, por tanto, que trabajará con una
desviación permanente, cuyo valor cambiará cuando
varíe la curva del proceso.

2.4. CONTROLADOR DE ACCIÓN INTEGRAL
(Pl)
En un controlador integral, la señal de
salida del mismo varía en función de la
desviación y el tiempo en que la misma se mantiene.
Recordemos que en el controlador proporcional no
había intervención alguna del tiempo. El
controlador variaba la señal de salida únicamente
en función de las modificaciones instantáneas del
PC o de la variable controlada.
Si el controlador fuese de acción
integral, la salida iría modificándose mien-tras se
mantuviese la desviación, y si no fuese capaz de
corregirla, llevaría el elemento final hasta su
máxima posición. Además, este tipo de
controladores integrales
permite eliminar errores en régimen permanente.
La definición matemática
es la siguiente:



Si = Salida integral.
E = Error (diferencia entre medición y PC).
ti = Tiempo integral.
También lo podemos expresar de otro
modo:
?S, = Cambio en la posición de la
válvula.
?t = Variación del tiempo.
?Si/?t= Velocidad de cambio de la
posición de la válvula, por lo que la
acción integral también la podemos expresar como la
velocidad con que se mueve la señal de salida, y es
proporcional al error existente.
Si E = 0, la válvula
permanecerá quieta.
Si E > 0, la señal de salida
aumenta con el tiempo, la válvula no está quieta,
irá abriendo o cerrando hasta E = 0.
Si E < 0, la señal de salida
disminuye con el tiempo, la válvula abrirá o
cerrará hasta que E = 0.
En la práctica no existen controladores
que tengan sólo acción integral, si- no que llevan
también una acción proporcional que actúa al
aparecer el error, aun cuando no hay transcurrido ningún
tiempo. Estas dos acciones se complementan.
La primera en actuar es la proporcional, que lo
hace instantáneamente, mientras que la integral
actúa durante un intervalo de tiempo. De este modo, y por
medio de la acción integral, eliminamos la
desviación residual permanente u OFFSET que, como
decíamos, era el principal inconveniente de la
acción proporcional.
La función de transferencia de un
regulador de acción integral es la siguiente:

siendo Kp la ganancia del regulador y
t¡ el tiempo integral.

En bucle cerrado, la función de
transferencia queda como indica la Figura 12.6.
 Donde:
Donde:

En la Figura 12.7 se muestra cómo se comportará
un controlador Proporcional + Integral.
Lo que se ajusta en este regulador es el llamado tr
(tiempo de reajuste), que se define como el tiempo que tarda
la acción integral, actuando sola, en producir una
variación en la salida igual a la que generará la
acción proporcional por separado.

Veamos un símil de un regulador integral
(Fig. 12.8).

La válvula de regulación está accionada
por un motor de corriente continua que gira proporcionalmente a
la tensión aplicada, por lo que una separación del
contacto deslizante q de la posición del cero de
tensión, determina apertura (por ejemplo, tensión
positiva V+) o cierre (por ejemplo, tensión negativa
V-) de la válvula con una velocidad proporcional
a la separación que se produzca, es decir, a la
variación que experimenta el flotador del punto de ajuste
y durante el tiempo que exista la variación.
Si suponemos que el nivel desciende por un aumento de consumo,
el contacto deslizante q se desliza sobre el reostato R,
dando una tensión al motor de signo positivo que hace
abrir la válvula. Esta apertura continuará has-ta
que el nivel no haya alcanzado el valor prefijado y el motor
reciba cero voltios.
En la Figura 12.9 podemos observar el comportamiento del
depósito descrito anteriormente.
2.5. CONTROLADORDE ACCIÓN
DERIVATIVA


En estos controladores, la salida ha de cambiar
proporcionalmente a la variación de la
medición.

Donde:
SD = Salida derivativa. M =
Medición.
td = Tiempo derivativo, qué es un
parámetro que se usa para dar mayor o menor importancia a
la acción derivada.
Si ponemos la expresión en forma de
incrementos, se obtiene:

Si la medición M es constante, no existe
acción derivada. Cuando exista un escalón en la
medición de forma súbita (en un instante de tiempo
muy pequeño), la velocidad de variación se hace
infinita, con lo que la acción derivada provoca
movimientos bruscos. Esto es indeseable, por lo que no se
aconseja el uso de la acción. Por consiguiente,
actuará solamente en caso de variaciones de error.
En definitiva, la acción derivativa se opone a las
desviaciones con una acción que es proporcional a la
rapidez de las mismas. Al igual que la acción integral, no
se puede emplear sola, va unida siempre a una acción
proporcional, o a una proporcional más integral.
La función de transferencia de un regulador de
acción derivativa es la siguiente:

siendo Kp la ganancia proporcional del
regulador y td el tiempo diferencial. En bucle cerrado,
la función de transferencia queda (Fig. 12.10):

Donde:

Anteriormente hemos indicado que tp es el
parámetro del que se dispone para dar mayor o menor
importancia a la acción derivada. tero en realidad se
utiliza el tiempo de avance (tA).
En la Figura 12.11 podemos ver el significado de
este tiempo.

ta se define como el tiempo en que se avanza una determinada
posición utilizando acción P + D, respecto a la
actuación de la acción proporcional por
separado.
Si tA es grande implica que se aplica
mucha acción derivada.
Si tA es pequeño se aplica muy
poca acción derivada.
2.6. EL CONTROLADOR PID

La acción derivada se utiliza en procedimientos
lentos en los que existen variaciones de carga, para que el
efecto de las perturbaciones sea menor y para con-seguir que la
medición se recupere antes. La diferencia entre un
controlador Pl y otro PID es que
este último hace que la válvula pase por una
posición determinada antes de lo que lo haría un Pl
solo. Es únicamente una ligera mejora, no existiendo mucha
diferencia entre el controlador Pl y el PID.

La expresión matemática
típica de la salida de un regulador PID es:
siendo E el error, BP la banda
proporcional, t¡ y td los tiempos integral y el
derivativo respectivamente y SPID la salida del
controlador proporcional-integral-derivativo.
El significado de cada una de las acciones que
intervienen en un regulador

PID se resumen en el margen.(Nota de Edic.I)
La función de transferencia de un
regulador de acción proporcional-integral-derivativa es la
siguiente:
siendo Kp, la ganancia proporcional del
regulador, td el tiempo diferencial, y ti el tiempo integral.
En bucle cerrado, la función de
transferencia queda como se indica en la Figura 12.12.

Donde:

Veamos a continuación cómo realiza
el proceso de ajuste un controlador PID.
a) Se comienza disponiendo en el controlador una
banda proporcional grande, una máxima acción
integral (tR máximo) y una mínima
acción derivada (tA mínimo).b) Se disminuye la banda proporcional hasta
que aparezcan tres picos en la oscilación de la medida
y teniendo un error.c) Se disminuye tR hasta que la
respuesta sea rápida y se elimina el error.d) Se va aumentando tA con lo
que pueden suceder dos cosas:
Que la respuesta empeore, con lo cual
colocamos tA = 0 y dejamos el controlador con Pl
solamente.Que la respuesta mejore, por lo que se puede
decir que tiende a no oscilar, lo que nos permitirá
reducir BP y tR.
Nota de Edic.:
Una banda proporcional alta significa poca
acción proporcional y produce lentitud y error
permanente.Una banda proporcional baja indica mucha
acción proporcional y origina ciclos.Un tiempo de reajuste alto equivale a poca
acción integral y provoca lentitud y error
duradero.Un tiempo de reajuste bajo es sinónimo de
mucha acción integral y produce ciclos.Un tiempo de avance alto significa mucha
acción derivada, generando ciclos.Un tiempo de avance bajo indica poca acción
derivada y da lugar a poco efecto derivativo.
Capítulo 3
Componentes de un
sistema de control
3.1. INTRODUCCIÓN
En el tema anterior abordamos el estudio de los controladores
o reguladores, indicando que eran los elementos más
importantes de un sistema de control y, por tanto, les dedicamos
un tema en exclusiva.
También analizamos en dicho tema que en los sistemas de
control y regulación había además otros
componentes denominados:
Transductores o captadores.
Detectores de error o comparadores.
Elementos finales o actuadores.
Este tema, último de la parte de sistemas
automáticos, lo vamos a dedicar al estudio de estos
componentes de un sistema de control, y veremos funda-mentalmente
aquellos llamados transductores o captadores y elementos fina-les
o actuadores.
3.2. TRANSDUCTORES Y CAPTADORES
3.2.1. Generalidades
Los transductores son aquellos elementos que transmiten
información de su entrada a su salida; adaptan un tipo de
energía a otro tipo de energía más
conveniente para ser usada por el controlador.
La misión,
como vemos en la Figura 13.1, consiste en transformar la
señal de mando en otra señal, denominada
señal de referencia, que pueda adaptarse para ser
comparada en el detector de error con la señal de
realimentación.
Esta señal procede de una adaptación de la
señal de salida mediante un elemento que llamamos
captador.

La naturaleza del captador es idéntica a la del
transductor; de hecho, un captador es un transductor colocado en
un lugar distinto del sistema, lo que nos indica que la
misión encomendada a cada uno de estos dos componentes
puede ser desempeñada por los mismos componentes
físicos.
Se llama captador porque la misión que tiene este
transductor es la de captar una determinada información,
en lugar de reaccionar a una determina-da señal de mando.
Entre estos elementos existen, pues, varias similitudes en cuanto
a identidad de
principios,
aunque hay diferencias entre ellos, dependiendo de la
situación en un sistema.
Ejemplo:
Un interruptor normal puede ser un transductor de entrada a un
sistema, pero no podrá ser un captador, dado que
está diseñado para funcionar manualmente.
Un interruptor final de carrera es un captador, pero no es un
transductor; nos informa de que una pieza ha llegado a una
determinada posición. Sin embargo, tanto el interruptor
normal como el final de carrera son interruptores (transductores
y captadores).
Una vez establecidas las deferencias y similitudes que existen
entre captadores y transductores, vamos a pasar al estudio de las
características de los transductores más usuales.
Éstos se clasifican en función de la naturaleza de
la señal de mando:
1. De posición:
. Finales de carrera.
. Detectores de proximidad, inductivos y
capacitivos, ópticos.
. Detectores lineales.
. Detectores angulares.
2. De velocidad:
. Tacómetros.
. Ópticos.
3. De presión:
. Piezoeléctricos.
4. De temperatura.
3.2.1.1. Transductores de
Posición
3.2.1.1.a. De final de carrera
Acción instantánea: En este
tipo de estructura de contactos, el movimiento del
actuador aplica fuerza a un
mecanismo de sobre centro, el cual crea un cambio rápido
en el estado del
contacto una vez que la posición de sobre centro se ha
excedido.
Acción instantánea/acción
de abertura positiva IEC: Esta estructura de contactos es muy
similar al contacto de acción instantánea con una
adición: la continua operación del mecanismo de
operación, más allá de la posición de
acción instantánea normal, aplica fuerza
directamente al contacto normalmente cerrado (N.C.) si
éste no se ha abierto con el mecanismo de acción
instantánea. Esto ayuda a asegurar la abertura hasta de un
contacto soldado. Por ejemplo, si un contacto tiene un punto de
operación de acción instantánea a un
movimiento giratorio de 40° el punto de acción de
abertura directa puede ser a 60° o más. No se aplican
fuerzas de acción de abertura directa al contacto N.A.
Acción lenta: Un tipo de estructura
de contacto que no tiene mecanismo sobre el centro. Los contactos
se mueven a una velocidad directamente proporcional a la
velocidad de operación del actuador. Los contactos se
deben tocar con una ligera presión de contacto.
Actuador: Un mecanismo de interruptor que
cuando se mueve según lo especificado, hace funcionar los
contactos del interruptor. Este mecanismo transmite la fuerza
aplicada desde el dispositivo de actuación al bloque de
contactos, causando la operación de éstos.
Fuerza de operación: La fuerza de
línea recta en la dirección designada aplicada al actuador
del interruptor para hacer que los contactos se muevan a la
posición de operación.
Par de operación: El par que se
debe aplicar al actuador para hacer que los contactos
móviles se muevan a la posición de operación
del contacto.
Posición de contacto de
operación: La posición a la cual se mueven los
contactos cuando el actuador es desviado a la posición de
operación del actuador o más allá de
ésta.
Posición de contacto normal: La
posición de los contactos cuando no hay una fuerza de
operación aplicada.
Posición de operación del
actuador: La posición del actuador cuando el contacto
está en operación.
Posición de restablecimiento del
actuador: La posición del actuador en la cual los
contactos se mueven de la posición de operación a
la posición "normal".
Posición libre del actuador: La
posición inicial del actuador cuando no hay una fuerza
externa (excepto la gravedad) aplicada al actuador.
Recorrido diferencial (recorrido para
restablecimiento de los contactos): El ángulo o
distancia a través del cual se mueve el actuador desde la
posición de operación de los contactos a la
posición de restablecimiento del actuador, o la distancia
entre el punto de operación y el punto de
liberación.
Recorrido previo (recorrido para operar los
contactos): Recorrido para que los contactos entren en
operación desde la posición libre del actuador.
Recorrido total o máximo: La suma
del recorrido previo y la sobrecarrera.
Sobrecarrera: El movimiento del actuador
más allá de la posición de operación
del contacto.
3.2.1.1.b De proximidad inductivos,
capacitivos y ópticos
b.1 Inductivos:
Principios de operación de los sensores de
proximidad inductivos

Los sensores inductivos de proximidad han sido
diseñados para trabajar generando un campo
magnético y detectando las pérdidas de
corriente de dicho campo generadas al introducirse en él
los objetos de detección férricos y no
férricos. El sensor consiste en una bobina con
núcleo de ferrita, un oscilador, un sensor del nivel de
disparo de la señal y un circuito de salida. Al introducir
un objeto metálico en el campo, se inducen corrientes de
histéresis en el objeto. Debido a ello hay una
pérdida de energía y una menor amplitud de
oscilación. El circuito sensor reconoce entonces un cambio
específico de amplitud y genera una señal que
conmuta la salida de estado sólido a la posición
"ON" (Encendido) y "OFF" (Apagado).

Una diana metálica que se está
aproximando a un sensor de proximidad inductivo (arriba) absorbe
la energía generada por el oscilador. Cuando el objeto se
halla próximo, la fuga de energía detiene el
oscilador cambiando de estado la salida.
Objeto estándar para sensores de
proximidad inductivos

La cara activa de un sensor de proximidad
inductivo es la superficie por la que emerge el campo
electromagnético de alta frecuencia.
Una diana estándar es un cuadrado de
acero, de 1 mm de
grosor, con longitud lateral igual al diámetro de la cara
activa ó 3X la distancia de conmutación nominal, el
que sea mayor de los dos.
Factores de corrección del objetivo para
sensores inductivos de proximidad
Para determinar la distancia de detección
para otros materiales
diferentes al acero templado se utilizan factores de
corrección. La composición del objeto a detectar
influye en gran medida en la distancia de detección de los
sensores de proximidad inductivos. Si se utiliza un objeto
construido a base de alguno de los materiales que a
continuación se listan, multiplique la distancia nominal
de detección por el factor de corrección listado
para determinar la distancia nominal de detección real de
dicho objeto. Tenga en cuenta que los sensores específicos
de materiales férricos no detectarán hojalata (zinc
+ cobre),
aluminio o
cobre, mientras que los sensores específicos de materiales
no férricos no detectarán acero ni aleaciones
férricas inoxidables.
Los factores de corrección de la citada
lista pueden utilizarse como guía general. Los materiales
comunes y su factor de corrección específico
aparecen listados en cada página de especificación
del producto
(Rango de sensibilidad nominal) x (Factor de
corrección) = Rango de detección.
Material específico | Factor de corrección |
Acero templado | 1.0 |
Acero inoxidable
Latón | 0.85
0.50 |
Aluminio
Cobre | 0.45
0.40 |
El tamaño y aspecto de los objetos a
detectar también puede afectar a la distancia de
detección. Los puntos que a continuación se exponen
deben utilizarse como orientación general a la hora de
hacer correcciones por tamaño o forma de un objeto:
1. Los objetos planos son más
deseables2. Las formas redondeadas pueden reducir
la distancia de detección3. Los materiales no férricos
reducen por lo general la distancia de detección en el
caso de sensores para cuerpos metálicos en general4. Los objetos de menor tamaño
que la superficie de detección reducen usualmente la
distancia de detección5. Los objetos mayores que la superficie
de detección pueden incrementar la distancia de
detección6. Los cuerpos laminares pueden
incrementar la distancia de detección

Histéresis (recorrido
diferencial)
La diferencia entre los puntos de
activación y relajación de un sensor se denomina
histéresis o recorrido diferencial de éste. La
distancia entre la posición de un objeto cuando se detecta
y la posición del mismo cuando deja de estarlo ha de
tenerse en cuenta al elegir la posición, tanto de los
objetos a detectar como del sensor. La histéresis es
necesaria para evitar fenómenos de rebote u
oscilación (conmutación rápida entre
estados) cuando el sensor se halla sometido a choques o
vibraciones o cuando el objeto a detectar se halla estacionario a
la distancia nominal de detección.
La amplitud de las vibraciones ha de ser menor
que el recorrido de histéresis (banda de
histéresis) para evitar fenómenos de rebote.

Frecuencia de conmutación
La frecuencia de conmutación es la
velocidad máxima a la que el sensor es capaz de entregar
pulsos discretos individuales según el objeto entra y sale
del campo de detección. Este valor depende siempre del
tamaño del objeto, de la distancia de éste a la
cara de detección, de su velocidad y del tipo de
interruptor. Este valor indica el máximo número de
operaciones de
conmutación por segundo. El método de
medición para determinar la frecuencia de
conmutación con dianas estándares está
especificado por IEC 60947-5-2.
m=d
Rizado
El rizado o factor de rizo es la componente de
tensión alterna (medida pico a pico) que se superpone al
valor de tensión continua y se expresa en porcentaje de
ésta última.
Para trabajar con interruptores o conmutadores de
tensión continua es necesario disponer de una alimentación en CC
filtrada y con un valor máximo de rizado del 10% (de
acuerdo con DIN 41755).

Consideraciones de montaje para sensores de
proximidad inmune a los efectos de los campos de
soldadura
La buena operación dependerá de la
intensidad del campo magnético y de la distancia entre la
línea de corriente (que genera el campo) y el sensor.
Utilice la siguiente gráfica o las fórmulas para
determinar los requisitos de espacio entre la línea de
corriente y el sensor de proximidad. Seleccione una distancia que
caiga dentro de la zona de seguridad.

donde:
I = corriente de soldadura (en
kA),
H = intensidad del campo (en kA/m),
B = flujo (en mT), y
r = distancia entre el sensor y las líneas
de transporte de
corriente (en metros).

Montaje perpendicular a la línea de
corriente

Sensores conectados en serie
Los sensores pueden conectarse en serie con una
carga. Para una correcta operación, la tensión de
carga ha de ser menor o igual al valor de tensión
mínima de alimentación menos las caídas de
tensión que se produzcan a través del conjunto de
sensores conectados en serie.

Conectados en paralelo
Los sensores pueden ser conectados en paralelo
con objeto de activar una carga. Para determinar el número
máximo de sensores permisible para una aplicación,
la suma de las pérdidas máximas de corriente de los
sensores conectados en paralelo ha de ser menor que la
máxima solicitación de corriente del dispositivo de
carga, estando éste en estado apagado u "OFF".

Nota: Ha de ponerse atención cuando se diseñen circuitos
paralelos de interruptores de proximidad. Si la corriente de
pérdida resultante es muy grande, al atravesar ésta
el dispositivo de carga puede ocurrir que la entrada de estado
sólido cambie de estado o que algún relé de
pequeño tamaño no se desconecte. La conexión
(adición) de sensores en paralelo no aumenta la capacidad
de carga en corriente.

Añada diodos a cada salida
según lo indicado, para mantener la función
indicadora de salida individua.

Añada R en ser serie con el sensor
para mantener una tensión mínima cuando el
sensor está conmutado

Nota: Al utilizar salidas tipo fuente,
la tierra hade
ser flotante y no común, de lo contrario se
producirá un cortocircuito.

Espaciado entre sensores blindados (montables
al ras) y próximos a superficies metálicas
Los sensores de proximidad blindados permiten que
el campo electromagnético se concentre enfrente de la cara
del sensor. La construcción blindada permite la
posibilidad de montaje de los sensores de proximidad al ras de en
piezas de metal que los rodean sin que se produzcan falsas
detecciones.


Espaciado entre sensores blindados (montables
al ras) y próximos a superficies metálicas
(cont.).

Espaciado entre sensores no blindados (no
montables al ras) y próximos a superficies
metálicas
Se pueden obtener mayores distancias de
detección utilizando sensores de proximidad no blindados.
Los sensores de proximidad sin blindaje requieren una zona libre
de metal alrededor de la cara de detección. Los cuerpos
metálicos más cercanos situados frente a la cara
sensora deben estar a una distancia superior a 3 veces la
distancia nominal de detección del sensor.

Aplicaciones


b.2. Capacitivos
Principios de operación de los sensores
capacitivos de proximidad

Sonda Oscilador Rectificador Circuito de salida
y filtro

Los sensores de proximidad capacitivos han sido
diseñados para trabajar generando un campo
electrostático y detectando cambios en dicho campo a causa
de un objeto que se aproxima a la superficie de detección.
Los elementos de trabajo del
sensor son, a saber, una sonda capacitiva de detección, un
oscilador, un rectificador de señal, un circuito de
filtraje y el correspondiente circuito de salida.
En ausencia de objetos, el oscilador se encuentra
inactivo. Cuando se aproxima un objeto, éste aumenta la
capacitancia de la sonda de detección. Al superar la
capacitancia un umbral predeterminado se activa el oscilador, el
cual dispara el circuito de salida para que cambie entre "on"
(encendido) y "off" (apagado).
La capacitancia de la sonda de detección
viene condicionada por el tamaño del objeto a detectar,
por la constante dieléctrica y por la distancia de
éste al sensor. A mayor tamaño y mayor constante
dieléctrica de un objeto, mayor incremento de
capacitancia. A menor distancia entre objeto y sensor, mayor
incremento de capacitancia de la sonda por parte del objeto.
Objeto estándar y toma de tierra para
sensores de proximidad capacitivos
El objeto estándar para los sensores
capacitivos es el mismo que para los de tipo inductivo. El objeto
a detectar ha de hallarse conectado a tierra según las
normas de
prueba IEC. En cualquier caso, los objetos a detectar en el
ámbito de una aplicación típica no necesitan
ser conectados a tierra para que la detección sea
fiable.
Comparación entre sensores inductivos
blindados y no blindados
Los sensores capacitivos de proximidad blindados
son más adecuados para detectar materiales de baja
constante dieléctrica (difíciles de detectar)
debido a la alta concentración de campos
electrostáticos. Esto les permite detectar objetos que con
sensores no blindados sería imposible. De cualquier
manera, esto los hace más susceptibles a los disparos en
falso a causa de la acumulación de suciedad o humedad en
la superficie de detección.
El campo electrostático de un sensor no
blindado es de más baja concentración que el
correspondiente a los modelos con
blindaje. Esto los hace adecuados para la detección de
materiales de alta constante dieléctrica (fáciles
de detectar) o también para discriminar entre materiales
de alta y baja constante dieléctrica. Para unos materiales
adecuados dados, los sensores capacitivos de proximidad no
blindados poseen distancias de detección mayores que los
blindados.
Los modelos no blindados están equipados
con una sonda de compensación que permite al sensor
ignorar el agua
pulverizada, polvo, un poco de suciedad y aceite
pulverizado o vapor de agua condensado en el sensor. La sonda de
compensación también hace al sensor más
resistente a las variaciones de humedad ambiental. El tipo no
blindado o sin apantallar es, por tanto, la elección
más adecuada para ambientes polvorientos y/o
húmedos.
Los sensores capacitivos no blindados son
también más adecuados que los de tipo blindado para
utilizarlos con anclajes de plástico,
accesorios diseñados para aplicaciones en la medida del
nivel de líquidos. El anclaje se monta por medio de un
barrero en el depósito y el sensor se introduce en el
receptáculo del anclaje. Este detecta el nivel de
líquido en el interior del tanque a través de la
pared del anclaje del sensor. Esto permite al anclaje la doble
función de tapón del barrero por un lado y por otro
de montura del sensor.
Factores de corrección del objeto para
sensores capacitivos de proximidad
Para un tamaño de objeto dado, los
factores de corrección de sensores capacitivos se
determinan por la propiedad del
material del objeto denominada constante dieléctrica. Los
materiales que poseen una constante dieléctrica más
alta son más fáciles de detectar que aquellos cuya
constante dieléctrica es menor. A continuación se
expone una lista parcial de constantes dieléctricas de
varias materias industriales.
Constantes dieléctricas de |
|
Aceite de soya | 2.9-3.5 |
Aceite de terpentina | 2.2 |
Aceite de transformador | 2.2 |
Acetona | 19.5 |
Agua | 80 |
Aire | 1.000264 |
Alcohol | 25.8 |
Amoniaco | 15-25 |
Anilina | 6.9 |
Arena | 3-5 |
Azúcar | 3.0 |
Azufre | 3.4 |
Baquelita | 3.6 |
Barniz de silicón | 2.8-3.3 |
Benceno | 2.3 |
Caliza de conchas | 1.2 |
Celuloide | 3.0 |
Cemento en polvo | 4.0 |
Cenizas | 1.5-1.7 |
Cereales | 3-5 |
Cloro líquido | 2.0 |
Cristal de cuarzo | 3.7 |
Dióxido de carbono | 1.000985 |
Ebonita | 2.7-2.9 |
Etanol | 24 |
Etilénglicol | 38.7 |
Freón R22 y 502 (líq.) | 6.11 |
Gasolina | 2.2 |
Glicerina | 47 |
Goma | 2.5-35 |
Harina | 1.5-1.7 |
Laca | 2.5-4.7 |
Leche en polvo | 3.5-4 |
Madera, seca | 2-7 |
Madera, verde | 10-30 |
Mármol | 8.0-8.5 |
Mica | 5.7-6.7 |
Nitrobenceno | 36 |
Nylon | 4-5 |
Panel de prensa | 2-5 |
Papel | 1.6-2.6 |
Papel satur. de aceite | 4.0 |
Parafina | 1.9-2.5 |
Perspex | 3.2-3.5 |
Petróleo | 2.0-2.2 |
Poliacetal | 3.6-3.7 |
Poliamida | 5.0 |
Poliestireno | 3.0 |
Polietileno | 2.3 |
Polipropileno | 2.0-2.3 |
Porcelana | 4.4-7 |
Resina acrílica | 2.7-4.5 |
Resina de urea | 5-8 |
Resina epoxi | 2.5-6 |
Resina estireno | 2.3-3.4 |
Resina fenólica | 4-12 |
Resina melamina | 4.7-10.2 |
Resina poliéster | 2.8-8.1 |
Resina PVC | 2.8-3.1 |
Sal | 6.0 |
Soluciones acuosas | 50-80 |
Teflón | 2.0 |
Tetracloruro de carbono | 2.2 |
Tolueno | 2.3 |
Vaselina | 2.2-2.9 |
Vidrio | 3.7-10 |
Comparación entre construcción
con blindaje y sin blindaje
Los sensores capacitivos tienen diseño
blindado o no blindado.
Sonda con blindaje
Los sensores blindados tienen una banda
metálica alrededor de la sonda. Esto ayuda a dirigir el
campo electrostático al frente del sensor y resulta en un
campo más concentrado.

La construcción blindada permite la
posibilidad de montaje de el sensor al ras en piezas de material
que los rodean sin que se produzcan falsas detecciones.
Sensores blindados montados al ras


Los sensores capacitivos blindados son adecuados
para detectar materiales de baja constante dieléctrica
(difíciles de detectar) debido a la alta
concentración de campos electrostáticos. Esto les
permite detectar objetos que con sensores no blindados
sería imposible.
Sonda blindada
Los sensores blindados e no tienen una banda
metálica alrededor de la sonda y por lo tanto tienen menos
concentración de campo electrostático. Muchos
modelos no blindados están equipados con sondas de
compensación, las cuales proporcionan mayor estabilidad al
sensor. Las sondas de compensación se describen
posteriormente en esta sección.

Los sensores capacitivos no blindados son
también más adecuados que los de tipo blindado para
utilizarlos con anclajes de plástico, accesorios
diseñados para aplicaciones en la medida del nivel de
líquidos. El anclaje se monta por medio de un barrero en
el depósito y el sensor se introduce en el
receptáculo del anclaje. Este detecta el nivel de
líquido en el interior del tanque a través de la
pared del anclaje del sensor.
b.3. Ópticos
Los sensores fotoeléctricos se utilizan en
muchas industrias y
aplicaciones para lograr una exacta detección de objetos
sin necesidad de contacto físico.
En su forma más básica un sensor
fotoeléctrico puede considerarse como un "sensor de
fín de carrera", donde el actuador mecánico, o
palanca de operación, ha sido reemplazada por un haz de
luz.
Los sensores fotoeléctricos trabajan
detectando el cambio en la cantidad de luz que, o bien es
reflejada, o bien interrumpida por el objeto a detectar (diana).
El cambio en el haz de luz puede ser el resultado de la presencia
o ausencia de la diana, o el resultado de un cambio en el
tamaño, perfil, receptividad o color de dicha
diana.
Se puede utilizar un sensor fotoeléctrico
para aplicaciones que detecten dianas a distancias inferiores a 5
mm (0.2 pulgadas) hasta 250 m (820 pies).
Para la detección eficaz utilizando un
sensor fotoeléctrico es necesario que el objeto a detectar
(diana) provoque un cambio suficiente en el nivel de luz
percibido por el sensor y que el usuario posea un conocimiento
claro de los requisitos de detección.
Han de tenerse claros los siguientes puntos:
Los requisitos de detección,
entorno de detección, y
las capacidades y limitaciones del sensor
fotoeléctrico.
Prepárese a responder a las siguientes
preguntas:
¿Cuáles son el tamaño, forma y/u
opacidad del objeto que se ha de detectar?¿Posee el objeto a detectar cualidades
reflectivas?¿Qué tiempo de respuesta se le
pide al sensor?¿Qué configuración de
montaje se requiere para el sensor? ¿Existen
restricciones físicas o posicionales a tener en
cuenta?¿Cuál es la frecuencia de
operación y qué requisito impone la velocidad
de operación al dispositivo de salida?¿Cuáles son los requisitos de
carga, tales como tensión, corriente, impedancia de
carga?¿De qué valores de
tensión y corriente de alimentación se dispone
para la operación del sensor?¿Cuál es la temperatura
ambiente que rodea el sensor fotoeléctrico?¿Existen otras condiciones
ambientales, tales como suciedad o altos valores de humedad,
que sean únicos en el área que rodea al sensor
fotoeléctrico?
Existe un gran número de sensores
fotoeléctricos para elegir. Cada uno de ellos ofrece una
combinación única de características de
detección, salida y opciones de montaje. Muchos sensores
también ofrecen lógica
incorporada o capacidades únicas de conexión en
red de
dispositivos.
Esta introducción le ayudará a
seleccionar el sensor fotoeléctrico para cada
aplicación.
Conceptos y componentes básicos
Un sensor fotoeléctrico tiene cuatro
componentes básicos:
Fuente de luz
Sensor de luz
Lentes
Dispositivo de conmutación de
salida
Fuente de luz
Un diodo emisor de luz (LED) es un semiconductor
de estado sólido que emite luz cuando se aplica corriente.
La Figura 1 muestra la estructura de un indicador LED.
Los LEDs se construyen para emitir longitudes de onda
específicas o colores de la
luz. Como fuente de luz se utilizan LEDs que emiten radiación
infrarroja, roja visible, verde y azul en la mayoría de
sensores fotoeléctricos.
El diferente color de los LEDs ofrece distintas
características deseables. Los LEDs infrarrojos son los
más eficaces, pues son los que más porcentaje de
luz emiten y los que menos calor disipan,
comparados con los de los tipos visibles. Los LEDs infrarrojos se
utilizan donde hace falta la máxima emisión de luz
en un margen de sensibilidad extendido.
En muchas aplicaciones es deseable un haz de luz
visible como ayuda en el ajuste o como confirmación de la
operación del sensor. El tipo rojo visible es el
más eficaz en el cumplimiento de estos requisitos.

Los LEDs de espectro visible rojo, azul y
amarillo también se utilizan en aplicaciones especiales
donde han de detectarse colores específicos o contrastes
de color determinados. Estos LEDs se utilizan asimismo como
indicadores de
estado en sensores fotoeléctricos.
Los indicadores LED son componentes resistentes y
confiables, lo cual los hace ideales para uso en sensores
fotoeléctricos. Son capaces de trabajar en un amplio
margen de temperatura y son muy resistentes a los impactos y
vibraciones.
Detección de luz
Un fotosensor es el componente usado para
detectar la fuente de luz. El fotodiodo o fototransistor es un
componente robusto de estado sólido que proporciona un
cambio en la corriente conducida dependiendo de la cantidad de
luz detectada.
Los fotosensores son más sensibles a la
emisión lumínica de ciertas longitudes de onda. La
respuesta espectral de un fotosensor determina su sensibilidad a
las diferentes longitudes de onda del espectro lumínico.
Para mejorar la eficacia en la
detección, es frecuente que el LED y el fotosensor hayan
de acoplarse espectralmente. En la Figura 2 se muestra
un ej.
Las longitudes de onda van desde 0.4 micrones
hasta 1 micrón

El LED invisible (infrarrojo) está
acoplado espectralmente con este fototransistor de silicio y
posee una eficiencia
mucho mayor que el LED visible (rojo).
El receptor es el fotosensor y el circuito
asociado.

LED con lente Fotosensor con lente
El margen es una medida de la cantidad de luz de
la fuente de luz detectada por el receptor. El concepto de margen
se puede explicar mejor por medio de un ejemplo:
Un margen de cero ocurre cuando el sensor de
luz no puede detectar nada de la luz emitida por la fuente de
luz.El margen de uno se obtiene cuando se detecta
la cantidad de luz suficiente para cambiar de estado el
dispositivo de salida (del estado CONECTADO al de
DESCONECTADO, o viceversa).Se dice que existe un margen de 20 cuando se
detecta una cantidad de luz 20 veces mayor que la
mínima requerida para cambiar de estado el dispositivo
de salida.
El concepto de margen se define como:
Cantidad actual de luz detectada
Cantidad mínima necesaria para cambiar de
estado el dispositivo de salida
y generalmente se expresa como una
relación o como un número entero seguido por"X". Un
margen de 6 puede expresarse como 6:1 ó como 6X.
Modulación del LED
La cantidad de luz generada por el indicador LED
en la fuente de luz es determinada por la cantidad de corriente
que éste conduce. Para incrementar el rango de un sensor
fotoeléctrico, la cantidad de corriente ha de aumentarse.
Sin embargo, los indicadores LED también generan
calor—existe un límite máximo de calor que se
puede generar, que si se excede, causará daño o
destruirá el indicador LED.
Los sensores fotoeléctricos cambian
rápidamente de estado o modulan la corriente que atraviesa
al LED. Un ciclo de servicio
ligero (generalmente menor del 5 %) permite que la cantidad de
corriente, y por lo tanto la cantidad de luz emitida, exceda en
gran medida lo
Permitido bajo una operación continua, vea
la Figura 4

La relación de modulación
o frecuencia es, a menudo, superior a 5 kHz, mucho más
rápida que la detectable por el ojo.
Detección sincronía
El receptor está diseñado para
detectar una fuente de luz pulsante de una fuente de luz
modulada. Para optimizar más aun la confiabilidad de
detección, el receptor y la fuente de luz están
sincronizados. El receptor está a la mira de los pulsos de
luz que son idénticos a los pulsos generados por la fuente
de luz.
La detección sincronía ayuda al
sensor fotoeléctrico a ignorar los pulsos de luz de otros
sensores fotoeléctricos ubicados en las proximidades, o de
otras fuentes de luz
pulsante tal como luces fluorescentes.
La detección sincronía sólo
es posible cuando la fuente de luz y el receptor están en
el mismo envolvente, lo cual es cierto para todos los modos de
detección, excepto el haz transmitido, tal como se explica
a continuación.
Modos de detección
fotoeléctrica
Los diferentes métodos de detección
reciben el nombre de modos de detección. Hay tres tipos
básicos:
Haz transmitido (algunas veces llamado a
través del haz)Retrorreflectivo (algunas veces llamado
reflejo)Difuso (llamado también de
proximidad)Mientras que muchas aplicaciones se pueden resolver por
cualquiera de estos métodos de detección, cada
una de ellas tienen sus pros y sus contras a considerar.
Estos pros y contras se resumen en la Tabla 1.
Tabla 1
Ventajas y precauciones de los modos de
detección fotoeléctrica
Modo de detección | Aplicaciones | Ventajas | Consideraciones | ||
Haz transmitido | Detección de uso general Conteo de |
superficie
objetos altamente reflectivos |
| ||
 Página anterior Página anterior | Volver al principio del trabajo | Página siguiente  |